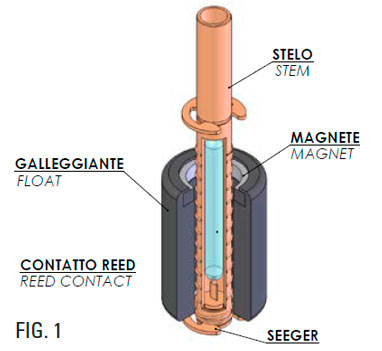
In Abb. 1 sind die Bestandteile eines elektromagnetischen Füllstandsensors mit vertikalem Betrieb zu sehen.
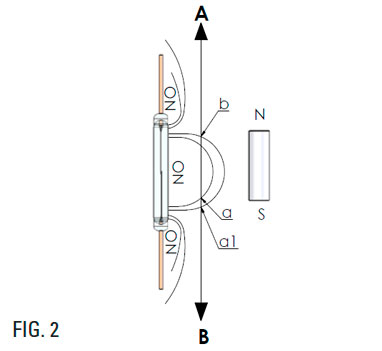
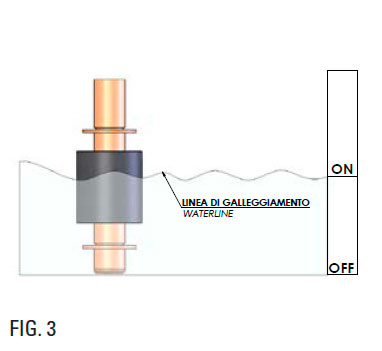
Die Abbildungen 2 und 3 zeigen den Betrieb eines Anzeigers mit normalerweise offenem Kontakt; Wenn der Flüssigkeitspegel steigt, bewegt sich der Schwimmer von B nach A, und sobald der in ihm vorhandene Magnet den Punkt “a” erreicht, schließt sich der Kontakt.
In der Regel wird der Schwimmerhub von einer mechanischen Sperre begrenzt, anderenfalls kehrt der Kontakt in seine Ausgangsposition zurück, wenn sich der Magnet über den Punkt “b” hinaus bewegt. Wenn der Flüssigkeitspegel sinkt, bewegt sich der Schwimmer von A nach B und sobald der Magnet den Punkt "a1" erreicht, öffnet sich der Reed-Kontakt wieder. Der Unterschied zwischen den Punkten “a” und “a1” heißt Differential oder Hysterese des Kontakts.
Normalerweise ist das Differential sehr klein und kann im Bedarfsfall mithilfe von Spezialkontakten vergrößert werden. Um den Zustand des Kontakts von NO auf NC und umgekehrt zu invertieren, muss im Normalfall der Schwimmer lediglich umgedreht werden.